Yaskawa Electric Servo Motor InsB 200V SJME-04AMB41-0Y 400W Industriële Servomotor
Specificaties
Stroom: 2.0A
Voltage: 200V
Vermogen: 400W
Nominaal koppel: 1.27N-m
Max. snelheid: 3000rpm
Encoder: 17-bits Absolute encoder
Belastingsinertie JL kg¡m2¢ 10−4: 0.026
As: recht zonder spie
ANDERE SUPERIEURE PRODUCTEN
Yasakawa Motor, Driver SG- Mitsubishi Motor HC-,HA-
Westinghouse Modules 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Fanuc motor A0-
Rosemount transmitter 3051- Yokogawa transmitter EJA-
Contactpersoon: Anna
E-mail: wisdomlongkeji@163.com
Mobiel: +0086-13534205279
Similaire Producten
SJDE-01APA
SJDE-02APA
SJDE-04APA
SJDE-04APA+SJME-04AMB41
SJDE-08APA
SJME-01AMA41
SJME-04AMA41
SJME-04AWA41
SJME-08AWA41
De omvormer bestaat uit drie halfbrug-eenheden waarbij de bovenste en onderste schakelaar complementair worden aangestuurd, wat betekent dat wanneer de bovenste is ingeschakeld, de onderste moet worden uitgeschakeld, en vice versa. Aangezien de uitschakeltijd van het vermogenselement langer is dan de inschakeltijd, moet enige dode tijd worden ingevoegd tussen het moment dat de ene transistor van de halfbrug is uitgeschakeld en het complementaire apparaat is ingeschakeld. De uitgangsspanning wordt voornamelijk gecreëerd door een Pulse Width Modulation (PWM) techniek, waarbij een gelijkbenige driehoekige draaggolf wordt vergeleken met een sinusvormige modulatiegolf met fundamentele frequentie. De natuurlijke snijpunten bepalen de schakelpunten van de vermogenselementen van een halfbrug-omvormer. Deze techniek wordt getoond in Figuur 3-6. De 3-fasige spanningsgolven zijn 120o ten opzichte van elkaar verschoven en kunnen daardoor een 3-fasige motor worden gevoed
De meest populaire vermogenselementen voor motorbesturingsapplicaties zijn Power MOSFETs en IGBT's. Een Power MOSFET is een spanningsgestuurde transistor. Het is ontworpen voor werking op hoge frequentie en heeft een lage spanningsval, dus het heeft lage vermogensverliezen. De verzadigingstemperatuursgevoeligheid beperkt echter het gebruik van de MOSFET in toepassingen met hoog vermogen. Een Insulated-Gate Bipolar Transistor (IGBT) wordt aangestuurd door een MOSFET op zijn basis. De IGBT vereist een lage aanstroom, heeft een snelle schakeltijd en is geschikt voor hoge schakelfrequenties. Het nadeel is de hogere spanningsval van de bipolaire transistor, wat hogere geleidingsverliezen veroorzaakt.

Vectorbesturing is de meest populaire besturingstechniek voor AC-inductiemotoren. In speciale referentieframes is de uitdrukking voor het elektromagnetische koppel van de machine met gladde luchtspleet vergelijkbaar met de uitdrukking voor het koppel van de afzonderlijk bekrachtigde DC-machine. In het geval van inductiemachines wordt de besturing meestal uitgevoerd in het referentiefram (d-q) dat is gekoppeld aan de rotorflux-ruimtevector. Daarom vereist de implementatie van vectorbesturing informatie over de modulus en de ruimtehoek (positie) van de rotorflux-ruimtevector. De statorstromen van de inductiemachine worden gescheiden in flux- en koppelproducerende componenten door gebruik te maken van transformatie naar het d-q coördinatensysteem, waarvan de directe as (d) is uitgelijnd met de rotorflux-ruimtevector. Dat betekent dat de q-as component van de rotorflux-ruimtevector altijd nul is:

 Uw bericht moet tussen de 20-3.000 tekens bevatten!
Uw bericht moet tussen de 20-3.000 tekens bevatten!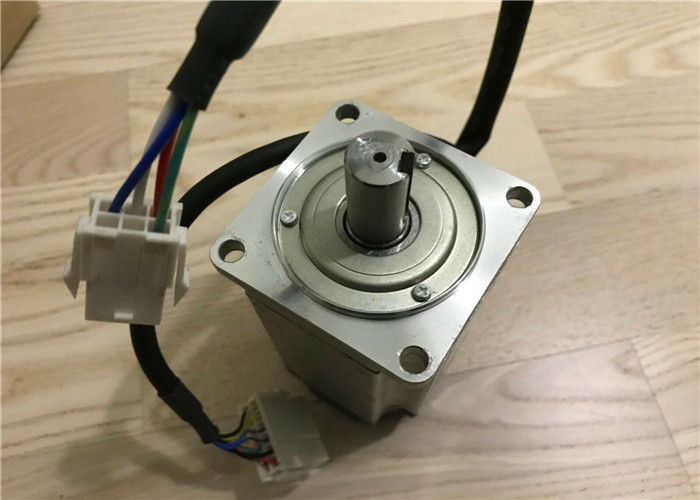
Algemene Beoordeling
Beoordelingsmomentopname
Het volgende is de verdeling van alle beoordelingenAlle recensies