Industriële Yaskawa-Sigma 2 Reeks Nieuwe 100W AC SERVOmotor sgmph-01A1A41
BESCHRIJVING
- Elektrische Yaskawa
- AC Servomotor
- Sigma 2 (σ-II Reeks)
SEPCIFICATIONS
| Fabrikant |
Yaskawa/MagneTek/Saftronics/Omron |
| Reeks |
Sigma 2 (σ-II Reeks) |
| Gewicht |
5KG |
GELIJKAARDIGE PRODUCTEN
| Sgmph-02a1a-YR12 |
Sgmph-02a1a-YR21 |
| Sgmph-02a1a-YR31 |
Sgmph-02a1a-YR32 |
| Sgmph-02a2a-YR12 |
Sgmph-02a2a-YR21 |
| Sgmph-02AAA2B |
Sgmph-02AAA2C |
| Sgmph-02AAA2E |
Sgmph-02AAA2E |
| Sgmph-02AAA4B |
Sgmph-02AAA61 |
| Sgmph-02BAA21 |
Sgmph-02BAA41 |
| Sgmph-04A1A21 |
Sgmph-02BAAG161 |
| Sgmph-04A1A2B |
Sgmph-04A1A2C |
| Sgmph-04A1A41 |
Sgmph-04A1A4B |
Contactpersoon: Anna
E-mail: wisdomlongkeji@163.com
Cellphone: +0086-13534205279
ANDERE SUPERIEURE PRODUCTEN
| Yasakawamotor, Bestuurderssg |
Mitsubishi-Motor HC-, Ha |
| Westinghousemodules 1C-, 5X- |
Emerson VE-, kJ |
| Honeywell TC-, TK- |
GE-Modules IC - |
| Fanucmotor A0- |
Yokogawazender EJA- |
De aanwezigheid van dit hoge doordringbaarheidsmateriaal veroorzaakt dat de magnetische die stroom worden beperkt grotendeels tot de wegen door de statorstructuur worden bepaald op dezelfde manier dat de stromen tot de leiders van een elektronische kring beperkt zijn. Dit dient om de stroom bij de statorpolen te concentreren.
Figuur 4. Principe van een motor van de schijfmagneet door Portescap.= N N N N S S S 3 wordt ontwikkeld die
Figuur 5. Magnetische stroomweg door een twee-pool stepper motor met een vertraging tussen de rotor en de stator.
Figuur 6. Eenpolige en bipolaire gekronkelde stepper motoren. de torsieoutput door de motor wordt veroorzaakt is evenredig aan de intensiteit van de magnetische geproduceerde stroom wanneer het winden die wordt geactiveerd.
De basisverhouding die de intensiteit van de magnetische stroom bepaalt wordt bepaald door:
H = (N × i) ÷ l waar:
N = het aantal het winden draaien
i = stroom
H = Magnetisch veldintensiteit
l = de lengte van de Magnetische stroomweg
Deze verhouding toont aan dat de magnetische stroomintensiteit en bijgevolg de torsie aan evenredig is
het aantal het winden draaien en huidig en omgekeerd evenredig aan de lengte van de magnetische stroomweg.
Van deze basisverhouding kan men zien dat dezelfde stepper van de kadergrootte motor de zeer verschillende mogelijkheden van de torsieoutput kon eenvoudig hebben door de het winden parameters te veranderen. De meer gedetailleerde informatie over hoe de het winden parameters het outputvermogen van de motor beïnvloeden kan in de toepassingsnota worden gevonden getiteld „de Grondbeginselen van de Aandrijvingskring“.
Configuratieelementen
(a) het controlemechanisme van controlemechanismeThe is de SynqNet-netwerkgastheer. Er zou slechts één controlemechanisme per netwerk moeten zijn.
(b) de knopena knoop is een slaaf en niet het controlemechanisme, tenzij anders vermeld.
(c) begeindiger een facultatieve die loopbackschakelaar aan het eind van een knoopketting in een koordtopologie wordt geplaatst.
Topologie
SynqNet steunt een ringstopologie waar de netwerkknopen in reeks terug naar het SynqNet-controlemechanisme worden verbonden. In een ringstopologie, als elke kabel of knoop ontbreken, zal het netwerk pakketgegevens rond de onderbreking opnieuw richten en zal de toepassing met een gebeurtenis meedelen. De plaats van de onderbreking kan door de toepassing worden bepaald.
(Geopend of de geëindigde) koordtopologie wordt ook gesteund waar de netwerkknopen niet terug naar het SynqNet-controlemechanisme worden verbonden. Als een kabel breekt, zullen de knopen stroomafwaarts van de onderbreking niet meer kunnen verzenden/ontvangen pakketten to/from het controlemechanisme. Het voordeel om een begeindiger op de laatste knoop te gebruiken is dat de tijd van de netwerkinitialisering wordt verminderd, omdat het controlemechanisme de laatste knoop op een netwerk kan deterministisch vinden. Beide types van koordtopologie steunen fouten geen terugwinning.
De cyclische Reacties worden Alle cyclische reacties ontvangen elke controlecyclus en zijn beschikbaar in de buffer van de knoopreactie.
(1) drijf Klaar aantoont dat de mededelingen actief zijn. Geldig op elk moment.
(2) Klaar de codeur toont aan dat de periodieke codeur correct op synchrone wijze communiceert. Geldig wanneer de Aandrijvings Klaar reactie verschijnt.
(3) Aangedreven de ampère toont aan dat het motorvoltage beschikbaar is om servo te drijven. Geldig wanneer de Aandrijvings Klaar reactie verschijnt.
(4) servo OP toont aan dat servo of gehandicapten wordt toegelaten. Niet zal geplaatst worden als de aandrijving of door PWM te draaien van of door dynamische te remmen onbruikbaar wordt gemaakt. Geldig wanneer Klaar de Aandrijving wordt geplaatst.
(5) de torsiegrens toont aan dat de Torsieverwijzing over de Torsiegrens is. Geldig wanneer de Aandrijvings Klaar reactie verschijnt.
(6) de waarschuwing waarschuwt ervoor dat de voorzorgsmaatregelen moeten worden genomen om een fout of een fout te verhinderen. Geldig op elk moment.
(7) de fout toont aan dat een fout sluiting de versterker heeft. Om de foutenoorzaak te bepalen, moet de foutcode worden gelezen gebruikend een geheugenverrichting. Geldig op elk moment.
(8) de positieterugkoppeling keert een positiewaarde met 32 bits bij elke controlecyclus terug.
(9) Monitor_A/Torsie Echo Shows dat de torsiewaarde bij elke controlecyclus is teruggekeerd.
(10) Monitor_C/Multi-turn Gegevens keren een multi-turn gegevenswaarde terug met 16 bits.


 Uw bericht moet tussen de 20-3.000 tekens bevatten!
Uw bericht moet tussen de 20-3.000 tekens bevatten!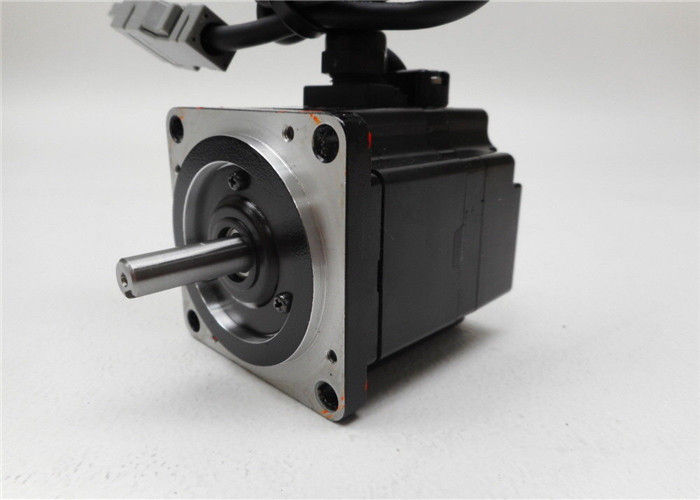
Algemene Beoordeling
Beoordelingsmomentopname
Het volgende is de verdeling van alle beoordelingenAlle recensies